
Department of Sensory Media
Project | Proactive Desk
Force Display System for a Digital Desk
Introduction | Mechanism of Force Generation | Force Feedback | Goals | Materials | Publications | Members
Introduction

The Proactive Desk is a new digital desk with force feedback. The concept of a digital desk was proposed by Wellner in 1991 for the first time. A typical digital desk enables a user to seamlessly handle both digital and physical objects on the desk with a common GUI standard. The user, however, handles them as virtual GUI objects. Our Proactive Desk allows the user to handle both digital and physical objects on a digital desk with a realistic feeling. In the Proactive Desk, two linear induction motors are equipped to generate an omnidirectional translational force on the user's hand or on a physical object on the desk without any mechanical links or wires, thereby preserving the advantages of the digital desk.
Mechanism of Force Generation
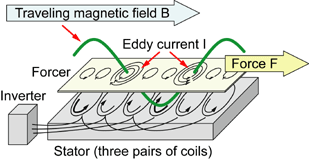
A linear induction motor (LIM) is employed as the mechanism for generating the physical information. The principle of one-degree-of-freedom linear induction motor (LIM) is the same as that of a widely used standard AC three-phase rotary motor. In the stator, three pairs of coil sets are lined up along the moving direction. When a three-phase current is turned on for each coil set, the traveling magnetic field B is generated along the coils. Avoiding the field, the eddy current I is induced on the forcer, and the current I and the magnetic field B generate the translational force F on the forcer by Fleming's left-hand rule. The Proactive Desk uses two sets of LIM cores and coils placed in orthogonal orientation inside the desk. The two-degree-of-freedom LIM moves a nonmagnetic conductive material plate (we call it a "Forcer") on the desk in any direction in two-dimensional space in accordance with Fleming's left-hand rule. The maximum force generated on the Forcer depends on the size and thickness of the plate. The trial system has generated maximum forces of 11 N using a copper plate of 200 mm x 100 mm x 10 mm.
Force Feedback
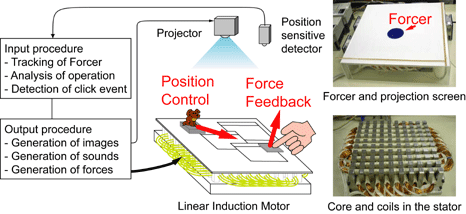
The system tracks the Forcer on the desk and controls its position using feedback procedures for making it an input and output device. An LED attached on the Forcer is traced by position sensitive detectors (PSD) placed overhead. The computer calculates appropriate powers using this location data to move the Forcer toward any location and to give the user tactile sensations. In this system, we used an infrared LED to avoid the influence of mixing illuminating colors because the computed image is projected on the same desktop. We added a filter to remove infrared light from the lens of the projector, and also place a filter in front of the PSD through which only an infrared ray can penetrate.
The Forcer also has a grip on the plate to make it the input and output interface of the system. In this application, we used a paintbrush-type grip to mimic real drawing tools. Additionally, the grip has a button for the drawing operation (We are planning in future work to change this button-type operation to another method, such as using a pressure sensor, for more intuitiveness.) When the button is pressed and released, the LED on the Forcer flashes with unique pulse-patterns for a few milliseconds (a battery and a microcontroller for driving the LED are installed inside the grip). The PSD is an analogue device having a potential running power in the order of kHz, which is adequate for detecting those patterns. Then this detection becomes a trigger to perform the clicking operation of the mouse. While the button is being pressed and the device moved, a color is put on the canvas, and then the user can feel appropriate physical power from the digital color by handling the Forcer.
Goals
The goals of this project are to enable the user to handle objects with the feeling of haptic sensation as if he/she were handling real objects, and it can also control real objects on the desk in response to events on the digital desktop. The Proactive Desk is a solution for building a closed physical feedback loop within the concept of the Digital Desk.
Materials



Publications
-
The Proactive Desk: A New Haptic Display System for a Digital Desk Using
a 2-DOF Linear Induction Motor
Haruo NOMA, Shunsuke YOSHIDA, Yasuyuki YANAGIDA, Nobuji TETSUTANI
Presence, Vol.13, No.2, pp.146-153, April 2004
- In Japanese
-
Proactive Desk: New desktop environment with haptic display
Shunsuke YOSHIDA, Mitsuhiro KAKITA, Haruo NOMA, Nobuji TETSUTANI
Interaction2003, IPSJ Symposium Series Vol.2003, No.7, pp.211-212, 2003 -
Proactive Desk: Digital Desk with force feedback function using Linear Induction Motor
Shunsuke YOSHIDA, Haruo NOMA, Nobuji TETSUTANI
IEICE General Conference 2003, A-16-24, p.319, 2003 -
Design of the Proactive Desk Based on Characteristics of 2-DOF Linear Induction Motor
Mitsuhiro KAKITA, Shunsuke YOSHIDA, Haruo NOMA, Nobuji TETSUTANI
HIS Vol.5, No.3, pp.83-88, 2003 -
A Proposal of Information Kiosks with a Force Feedback using the Proactive Desk
Shunsuke YOSHIDA, Mitsuhiro KAKITA, Haruo NOMA, Nobuji TETSUTANI
Robomec2004, 1A1-H-75, 2004.6
- Project: Sumi-Nagashi
-
Sumi-Nagashi
Shunsuke YOSHIDA, Mitsuhiro KAKITA, Haruo NOMA, Nobuji TETSUTANI, Jun KURUMISAWA
ACM SIGGRAPH 2003 Emerging Technologies, 2003.7.27 -
A Perception of Streams in the Picturesque Installation by using Proactive Desk
Shunsuke YOSHIDA, Haruo NOMA, Jun KURUMISAWA, Nobuji TETSUTANI
IEEJ Electronics, Information and Systems Society 2003, TC9-5, pp.237-240, 2003.8 -
Implementation and Application of the Proactive Desk - An Experience of
a Streaming Picture of Sumi-Nagashi -
Shunsuke YOSHIDA, Mitsuhiro KAKITA, Haruo NOMA, Jun KURUMISAWA, Nobuji TETSUTANI
VRSJ 2003, pp.3-6, 2003.9 -
Sumi-Nagashi: Adding Corporeality and Tactile Sensation to Digital Painting
Shunsuke YOSHIDA, Haruo NOMA, Nobuji TETSUTANI, Jun KURUMISAWA
IEEE Computer Graphics and Applications, Vol.24, No.1, Emerging Technologies CD-ROM, 2004.1-2 -
Sumi-Nagashi: Creation of New Style Media Art with Haptic Digital Colors
Shunsuke YOSHIDA, Jun KURUMISAWA, Haruo NOMA, Nobuji TETSUTANI, Kenichi HOSAKA
ACM Multimedia 2004, pp.636-643, 2004.10
Members
- Shunsuke YOSHIDA
- Haruo NOMA
- Yasuyuki YANAGIDA
- Nobuji TETSUTANI
- Ken-ichi HOSAKA