IR-UWB技術を利用した高精度な測距測位システム
 印刷する
印刷する
特徴・優位性
- 高い時間解像度に基づく高精度かつ、リアルタイムの測距測位
- 低消費電力、低コスト
- 座標構築や対象空間での事前走行学習が不要なロボット自動走行
用途・応用分野
- ショッピングモール・物流倉庫などの屋内での、動線把握、ナビゲーション、ロボットの自動走行等

概要
IR-UWB(Impulse-Radio Ultra-WideBand)は高い時間解像度と低消費電力および低コストなどの特長を持ち合わせています。高精度な測距測位、車キーレスエントリー、近距離高速通信などでの利活用において注目を集めています。標準規格化も進み、スマートフォンやスマートウォッチなどの携帯端末への搭載も本格化してきました。
一方、UWBのハイバンド周波数を用いる場合に測距可能な距離が短くなる傾向を示しています。私たちは民間企業と協力し、IR-UWB受信機の検波回路で用いる検波閾値を受信信号強度に応じてアダプティブに変化させる構造を実装し、受信感度を6デシベル以上改善させることによって測距距離を伸ばすことに成功しました。また、一回の測位を数ミリ秒オーダーで完結させ、リアルタイム測位に繋がりました。
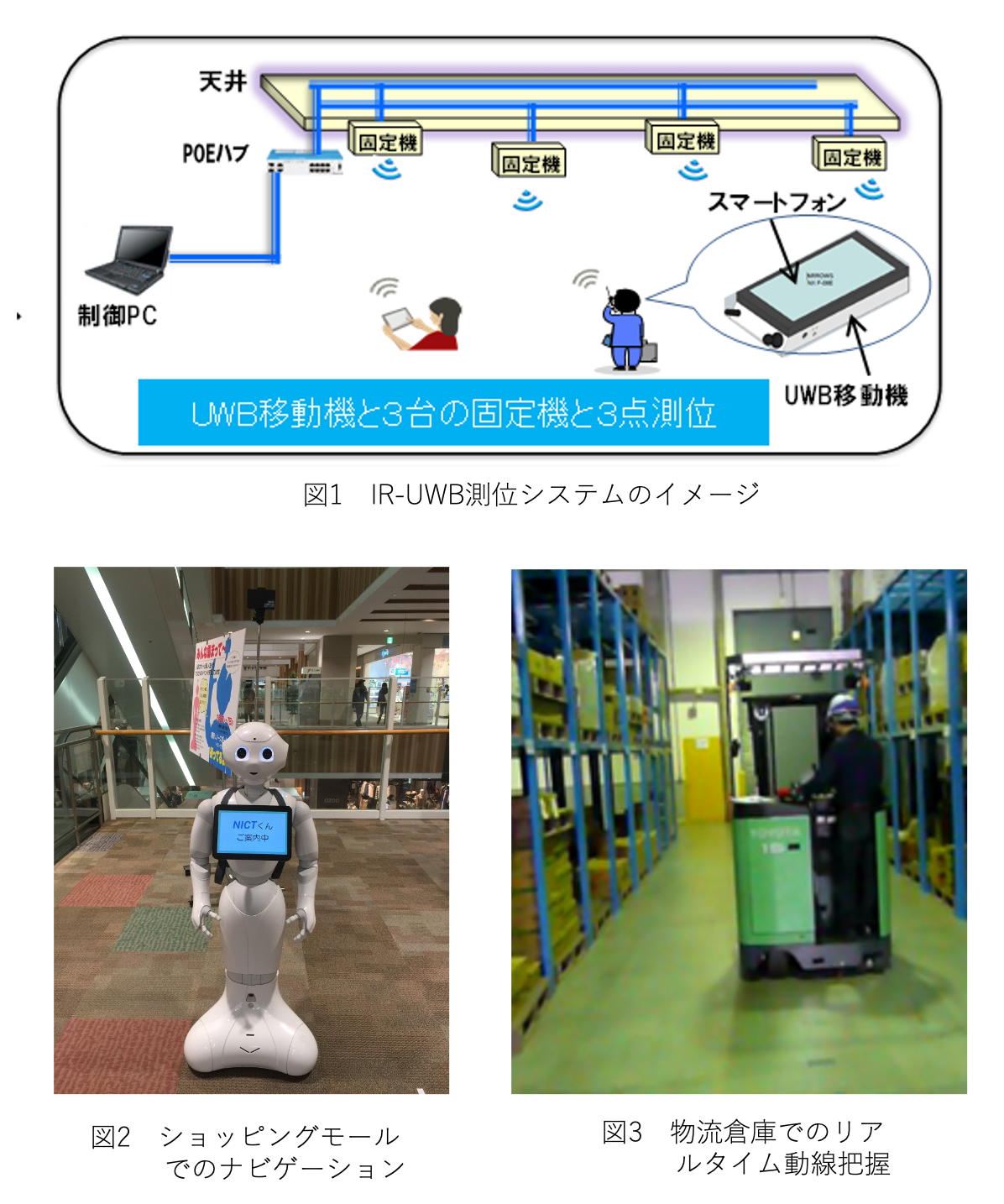
NICTが開発したIR-UWB測位システムのイメージを図1に示します。天井等に設置されている固定機に基づいて、移動機は3台以上の固定機との間でIR-UWB通信による距離計測を行い、3点測位によって自分の位置を推定します。このシステムをショッピングモールや物流倉庫に設置して、リアルタイムの動線把握、ナビゲーションなどを実証しました。また、図2に示すように、座標系なしに、作業台車に置く移動機と目標地点に置く固定機の間の距離計測結果を用いて、目標地点を推測するアルゴリズムを開発し、台車が推測結果に従って目標地点へ自動走行するシステムを民間企業と共同で実証しました。ロボット自動走行などへの応用が期待されます。(2025年6月19日更新)
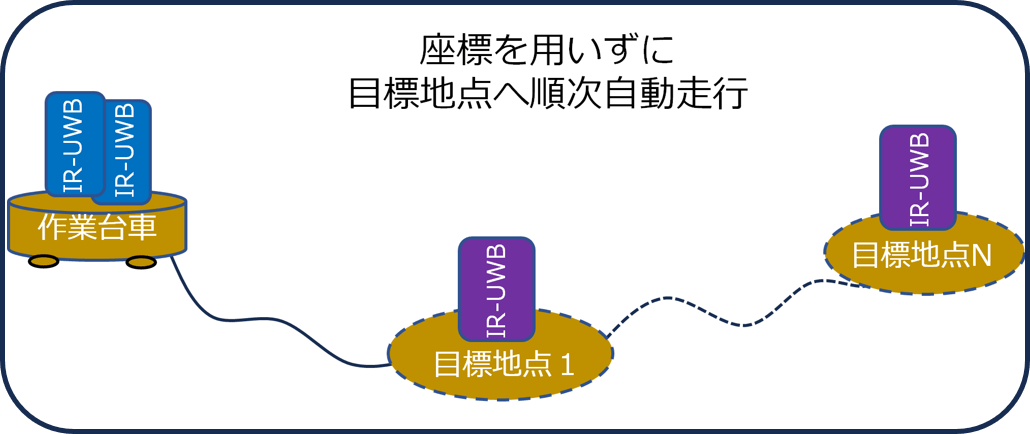
目標地点へ順次自動走行のイメージ
IR-UWB技術を利用した高精度な測距測位システム
関連情報
- プレスリリース:2015.08.10. UWB測位システムを使い、物流倉庫作業を大幅に効率化
- 特許:6653838号 6241642号
- 特開:2024-143171
- 特願:2024-028261
- 文献:
- H.-B. Li, R. Miura, H. Nishikawa, T. Kagawa, and F. Kojima, “Proposals and implementation of high band IR-UWB for increasing propagation distance for indoor positioning”, IEICE Trans. on Fundamentals, vol. E101-A, no.1, pp. 185-194, Jan. 2018
- 李、松村、滝口、唐木, “端末間IR-UWB測距に基づく自動走行台車の制御”, 2024年IEICE総合大会A-16-01
- プレスリリース:2015.08.10. UWB測位システムを使い、物流倉庫作業を大幅に効率化(https://www.nict.go.jp/press/2015/08/10-1.html)
- 特許:6653838号 6241642号
- 特開:2024-143171
- 特願:2024-028261
- 文献:
- H.-B. Li, R. Miura, H. Nishikawa, T. Kagawa, and F. Kojima, “Proposals and implementation of high band IR-UWB for increasing propagation distance for indoor positioning”, IEICE Trans. on Fundamentals, vol. E101-A, no.1, pp. 185-194, Jan. 2018
- 李、松村、滝口、唐木, “端末間IR-UWB測距に基づく自動走行台車の制御”, 2024年IEICE総合大会A-16-01
担当部門
ネットワーク研究所 ワイヤレスネットワーク研究センター ワイヤレスシステム研究室
ネットワーク研究所 ワイヤレスネットワーク研究センター ワイヤレスシステム研究室(https://www2.nict.go.jp/wslab/)
