次世代筋骨格モデル「Def muscle」の開発
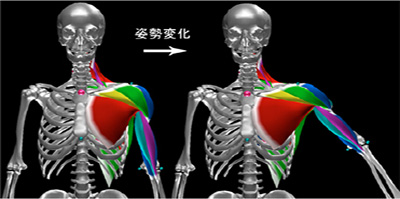
筋骨格モデルは、現在、人間工学やバイオメカニクス関連分野において幅広く用いられており、ヒトの運動を対象にしたあらゆる分野で必須のツールとなってきています。しかし、多くの筋骨格モデルでは、筋肉をボリュームのない直線や折れ線として単純化してしまっているため、筋が骨の中に埋まったり、本来表層にあるべき筋が深層の筋の内部に埋まったりといった不自然な状況が起きてしまう場合があり、関連分野全体の大きな課題になってしまっています。
本プロジェクトでは、この問題を根本的に解決するため、筋肉のボリューム及び干渉による変形を考慮した新しいタイプの筋骨格モデルの開発に取り組んでいます。本研究は、JSPS 科研費(24650383、15H05362)及びNICT社会還元促進ファンドの助成を受けて行われています。
実環境の運動制御実験系 ~モーションキャプチャーを利用~

運動制御・学習の研究、特に計算論的研究においては、主に腕到達動作が研究対象とされてきました。これは、到達動作が比較的シンプルで実験的に扱いやすいにも関わらず、運動制御に必要なエッセンスを多く含んでいるからです。しかし、腕到達運動で得られた知見がすべての運動に敷衍できるわけではありません。日常生活において、我々は、より多くの自由度・冗長性を有する身体を、刻一刻と変化する不安定な環境下において制御しています。
本プロジェクトでは、このような実環境における運動制御を研究するための実験系をモーションキャプチャーを用いて構築しています。
ニューラルネットワーク
ヒトの身体は非常に多くの筋を有しているため、ある目的の動作を達成しうる筋活動パターンは無数に存在します。脳はどのようにして、これら無数の解の中から、瞬時に一つの解を選び出しているのでしょうか?
従来、脳はある基準に照らし合わせて最も効率のよい活動パターンを選び出すことができる能力を有すると考えられてきました。しかし、最適な解を見つけ出す過程や、その生体での実現可能性ついては未だ明らかになっていません。
本プロジェクトでは、ヒトの筋骨格情報を有するニューラルネットワークを用いて、この問題の理論的な解明に挑んでいます。これまでに、「軽微な忘却」を有するニューラルネットワークは最適な解を導きうること、また、そのネットワークは霊長類の一次運動野で観察されるのとほぼ同じ神経活動パターンを再現できることを明らかにしています(Hirashima & Nozaki 2012, Plos Comp)。