Group leader:
Ken'ya FURUTA, Research Manager
/ 古田健也 研究マネージャー
チーム構成:
ポスドク1名、技術員3名、学生3名(2025年4月現在)
Biomolecular motors are molecular machines that produce various "movements" of living organisms. The most important function of these machines is to reliably "move unidirectionally" in the nanoscale world that is governed by thermal fluctuation. However, the basic mechanism of this function is still unclear. Focusing on biomolecular motors, kinesin and dynein, we are interested in the mechanism of energy conversion―the mechanism by which these machines produce unidirectional motion, and the mechanism of determining the force and direction of motion. We are also interested in the properties of their collective dynamics and the properties in the intracellular environment. For application-oriented research, we are working on the design and creation of new molecular machines that are redesigned with reference to naturally occurring molecular machines. We are now developing autonomous micro-robots that implement computational functions and memory by combining these machines.
生物分子モーターは、生物の様々な「動き」を生み出す分子マシンです。これらのマシンの一番重要な機能は、熱揺らぎが支配するナノスケールの世界で確実に「一方向に進むこと」ですが、その基本的なメカニズムは未解明です。当研究室では、生物分子モーターであるキネシン・ダイニンを中心に、これらが一方向性運動を生み出すメカニズム、力・運動方向の決定機構、エネルギー変換機構に興味を持って研究しています。また、これらの集合体の特性や細胞内環境での特性にも興味を持っています。発展的な研究として、天然から得られる分子マシンを参考に設計し直した新しい分子マシンや、これらを組み合わせて計算機能やメモリーを実装し、自律的な微小ロボットを設計・創出する研究も進めています。
学生として一緒に研究していただける方は、大阪大学大学院 理学研究科 生物科学専攻を受験していただく方法があります。詳細は専攻のホームページをご参照ください↓
https://www.bio.sci.osaka-u.ac.jp/admission-graduate-school/
“bio-molecular machines”のチームは、生物科学専攻の中で生物分子機械設計学という名前の研究室として活動しています。実験室は 情報通信研究機構(NICT) 未来ICT研究所(神戸/明石)内にあります。
https://www.bio.sci.osaka-u.ac.jp/pdf/nict_furutalab.pdf
※Research map のページもご参照ください。
Design principles of biomolecular motors
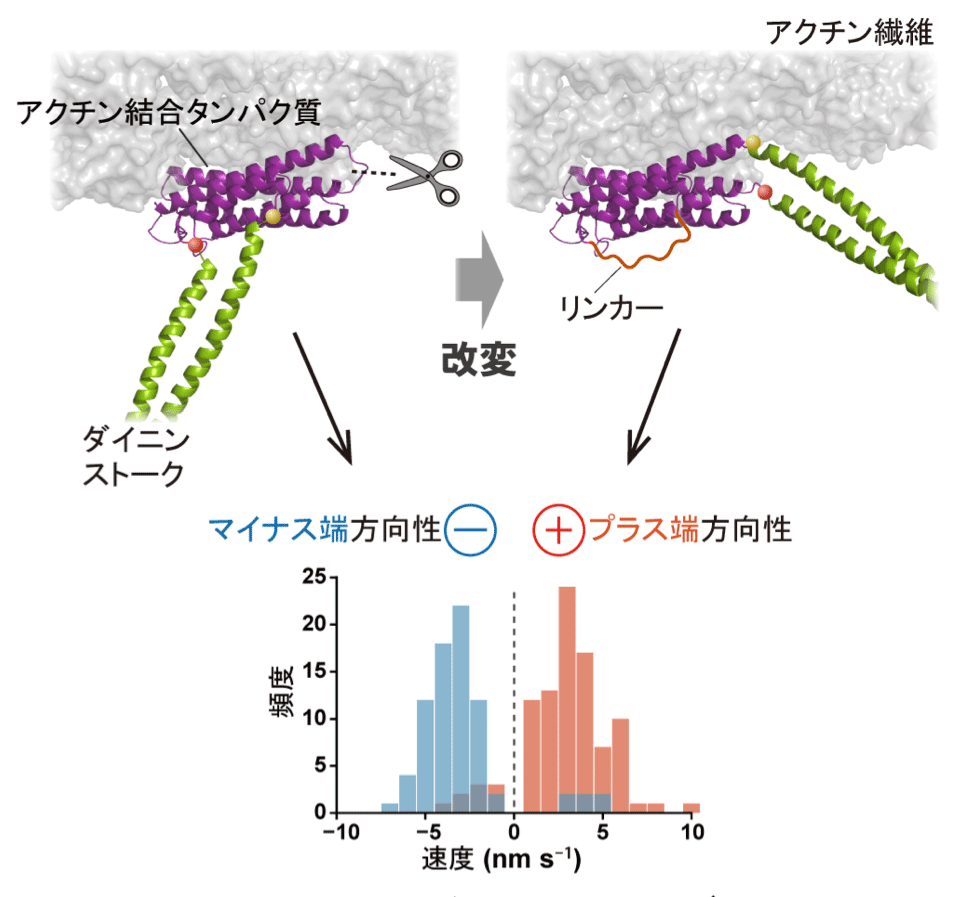
Figure 1. Protein engineering to create reversible molecular motors (Furuta et al., Nat Nanotech 2017).
図1.タンパク質エンジニアリングで逆方向性の分子モーターを創る。
In an environment governed by thermal fluctuations, it seems difficult for a protein to move unidirectionally. In addition to analyzing existing biomolecular motors, we are trying to establish a constructive approach by combining simple domains into a new biomolecular motor prototype and by observing how it behaves (Fig. 1).
生物分子モーターが働いている熱揺らぎが支配する環境で、アミノ酸がつながったヒモが折りたたまれただけのタンパク質が、確実に一方向に進むことは一見難しそうに思えます。これを理解するために、私たちは既存の生物分子モーターの分析に加え、いくつかの単純な要素を組み合わせて新しい生物分子モーターを試作し、それがどう振る舞うかを観察することによって「創って理解する」という構成的な研究手法を確立しようとしています(図1)。
Design and control of collective dynamics
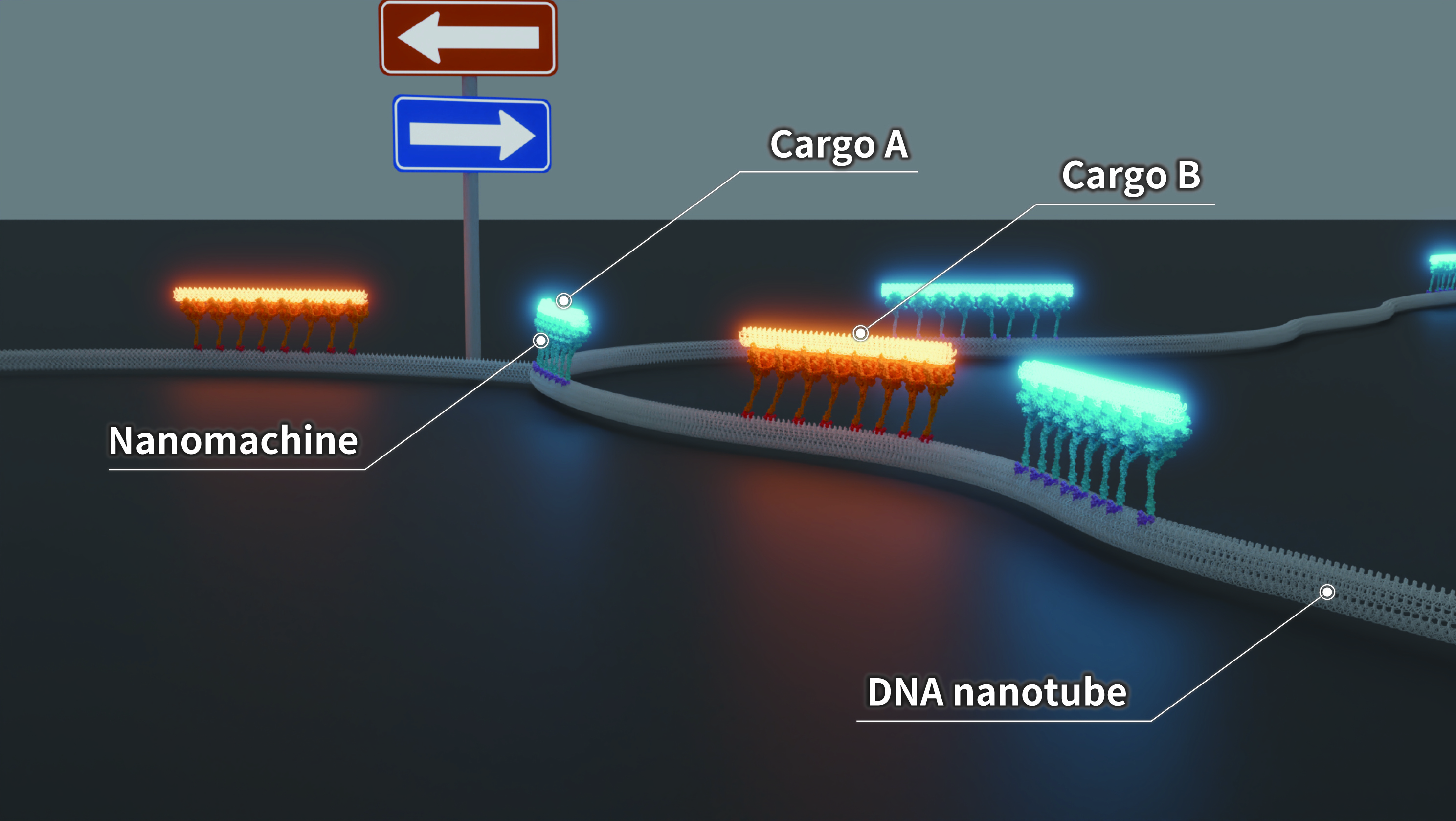
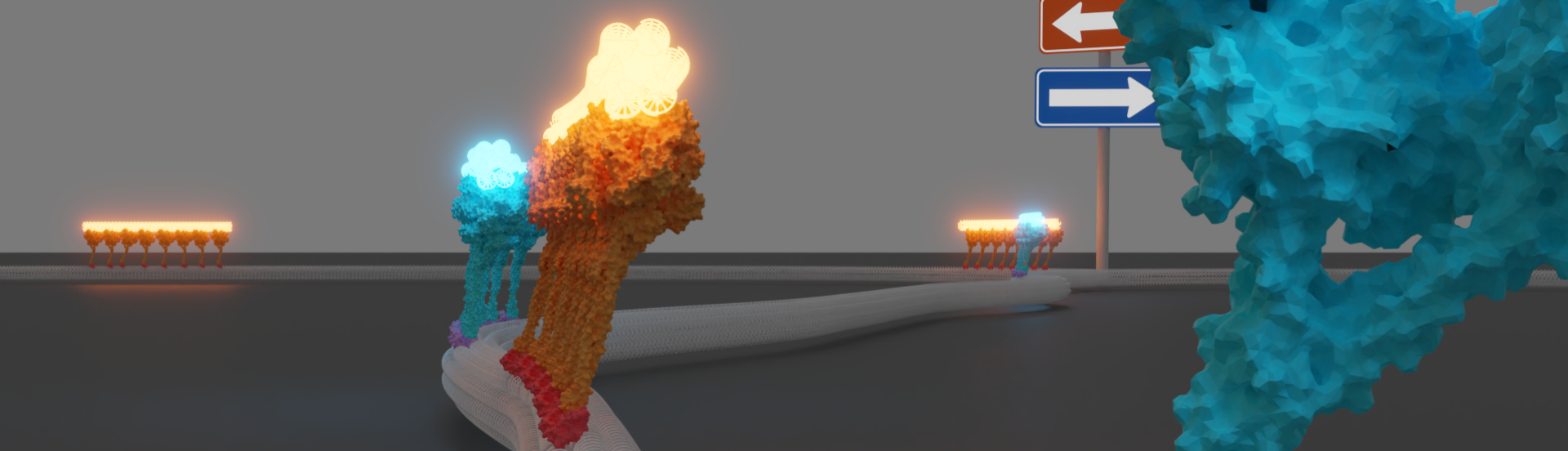
Figure 2. Schematic diagram of two types of nanomachines sorting two different cargos on a Y-shaped DNA nanotube (Ibusuki et al, Science 2022).
図2.Y字型のDNAナノチューブ上で二種類のナノマシンが「荷物」を仕分けている様子を描いた模式図。
Individual molecular motors cannot explain many biological phenomena. It is known that there is a complex chain of events that occurs between the layers, for example, molecules, teams of molecules, organelles, cells, and individuals. This chain organizes the disparate movements into orchestrated ones which are then fed back to each layer of the hierarchy. However, the question of how these layers are linked remains unclear. We believe this is the key to understanding how organisms are designed. We are creating experimentally accessible model systems using DNA nanostructures and other biological materials to explore such collective dynamics (Fig. 2).
個々の分子モーターはそれぞれがバラバラに機能していては生命現象を起こすことができません。分子、小器官、細胞、個体と階層を上がるに従い、バラバラだった動きが統制の取れたものになり、それがまた各階層にフィードバックされて影響を及ぼすという複雑な連環があることが分かっています。しかし、この部分と全体がどのように連環しているのか、という問題は未解明であり、この点は生物がどのようにデザインされているかを知るための鍵だと考えます。この問題に対して実験的にアクセス可能なモデル系を作り、集団特性・制御方法を模索しています(図2)。
Design of autonomous micro-robots
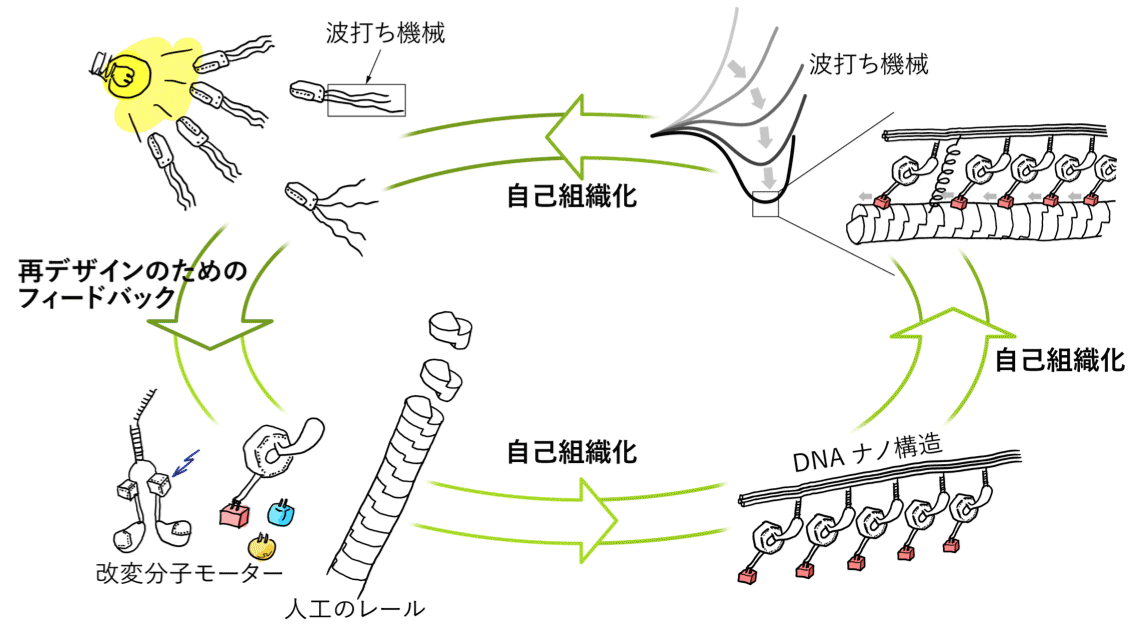
Figure 3. Example of an autonomous micro-robot with a hierarchical structure, which is our goal (Furuta et al., Curr Opin Biotechnol 2017).
図3.当研究室が目指す自己組織化による階層的な構造を持った自律型微小ロボットの例。
The three key elements of a robot are sensors, processors, and actuators. Cells are equipped with these elements and can be viewed as micro-robots that move autonomously. We would like to understand the mechanisms by which cells remember information, make decisions based on the information, through a synthetic biology approach―the creation of such micro-robots by assembling structures using biological materials and self-assembling techniques (Figure 3). To accomplish this, we use DNA nanostructures with excellent controllability. We have also built our own instruments such as microscopes and optical tweezers, control and analysis software, and basic experimental apparatuses, using machine tools and 3D printers. We also built a high-throughput research environment with the aid of pipetting robots and automated microscopes.
ロボットの重要な三要素は、センサー、プロセッサー、アクチュエーターです。細胞はこれらの要素を備えており、自律的に動く微小ロボットと捉えることもできます。私たちは、生物材料を使って自己組織化の手法で構造体を組み上げ、このような微小ロボットを創ることを通じて、細胞が何かを記憶したり、それをもとに意思決定したり、といった生物らしい行動を起こす仕組みを理解したいと考えています(図3)。このような研究を実現するために、私たちは、制御性の良いDNAナノ構造体を基本構造として用いています。また、顕微鏡・光ピンセットなどの装置,制御・解析ソフトウエア、実験器具などを3Dプリンタなども活用しながら自分たちで作り、市販の分注ロボットなども援用してハイスループットで機動力の高い研究環境を構築しています。